diy遥控飞机模型的基本要点-8

飞控
传统飞航模的玩家是不用飞控的,就是纯遥控,享受飞行乐趣,但是这对大多数人来说太难了,不用说控制,就是目视航模姿态都是个大难题。随着技术发展,现在飞控越来越普及,以至于几乎成为标配,最最基本的也会带陀螺仪。飞控主要作用有以下几点:
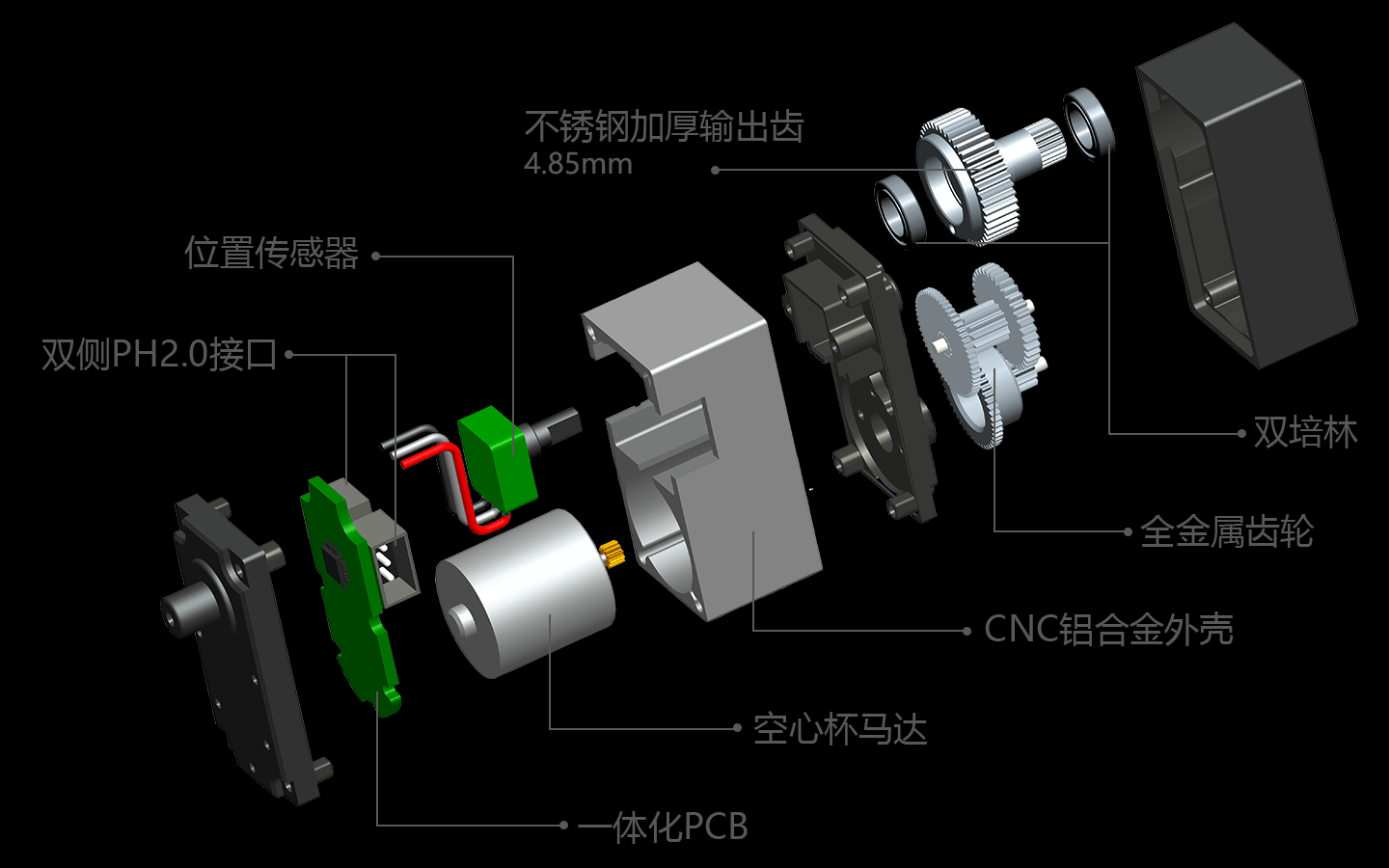
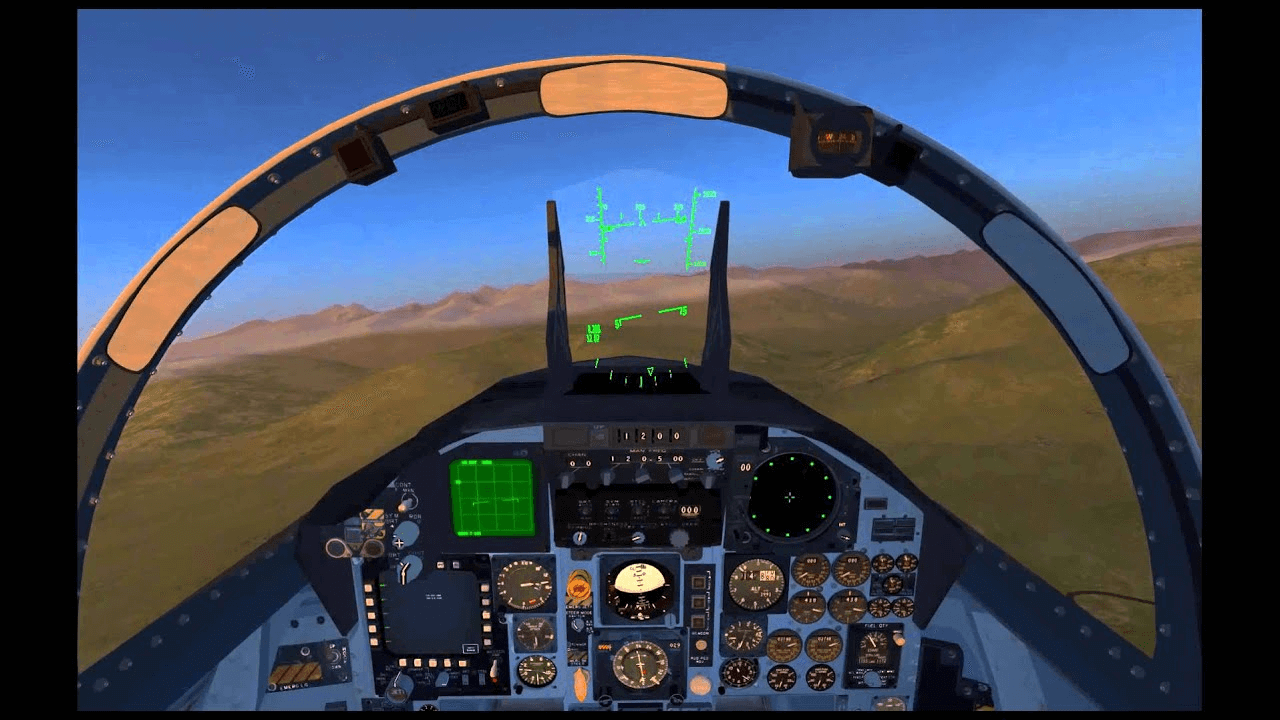
飞行控制:控制器是飞行器的指挥中心,它接收来自遥控器的指令,并将这些指令转化为电信号发送给舵机、电调等飞行器的执行器,从而控制飞行器的姿态、飞行速度和航向等。通过控制器,飞行员可以实现飞行器的各种动作,如升降、横滚、转向等,以及进行各种飞行模式的切换。
通信传输:控制器充当遥控器和飞行器之间的中介,负责将遥控器发送的无线信号解码,并将信号传输给飞行器的接收器。它确保遥控器和飞行器之间的可靠通信,使飞行员能够实时操控飞行器。
信号处理和稳定性控制:控制器可以对接收到的信号进行处理和调整,以提高飞行器的稳定性和响应性。它可以通过传感器(如陀螺仪、加速度计)获取飞行器的姿态信息,并根据设定的控制算法进行实时调整,使飞行器能够保持平衡和稳定的飞行状态。
参数调节和功能设置:控制器通常具有一些可调节的参数和功能设置,允许飞行员根据实际需求进行调节和优化。例如,可以调整舵机行程、反向设置、飞行曲线、灵敏度等参数,以适应不同的飞行需求和飞行器类型。
高级功能支持:一些先进的控制器还提供了一些高级功能,如舵机混控、自动驾驶、航向保持等。这些功能可以帮助飞行员实现更复杂的飞行动作和任务,提供更多的飞行乐趣和探索空间。