tdr原理和应用
电磁波在传播中遇到不均匀介质会发生反射,与此相似,电信号在传输线中传播时,如果遇到阻抗不连续的点,也会产生发射。TDR,指的是时域反射计,Time Domain Reflectometry,它通过发送一个短脉冲信号并监测该信号在电缆或导线中传播时的反射来实现。时域反射是一种用于测量导体或电缆中的信号反射情况的技术,广泛应用于分析传输线路、电缆和波导结构特性。它基于分析通过被测试结构发送的电磁脉冲或信号的反射,特别适用于定位传输线路上的故障、不连续性、阻抗变化和其他异常情况。
卡尔曼滤波的数学基础
卡尔曼滤波是一种用于估算线性动态系统状态的优化算法,其基础数学理论为贝叶斯定理,将传感器测量值和系统模型的预测值进行融合,得到对系统状态的估计。贝叶斯定理是基于条件概率的公式,用于计算给定某些证据的情况下,事件发生的概率。在卡尔曼滤波中,贝叶斯定理用于估算系统状态的后验概率分布,即给定过去和当前的观测值,预测未来状态的概率分布。以下是卡尔曼滤波的数学基础:
状态空间模型
卡尔曼滤波的核心是状态空间模型,它用一组状态方程和观测方程描述系统的演化和测量。状态方程表示系统状态如何随时间演化,通常用一个线性动态系统表示:
$$
x(k) = F(k-1)x(k-1) + w(k-1)
$$
其中,x(k)表示系统在时刻k的状态,F(k-1)是状态转移矩阵,w(k-1)是系统的过程噪声,通常假设为高斯白噪声。
PCB封装设计实践
在之前的文章 详解AD(Altium Designer 23)中的机械层 - 1、详解AD(Altium Designer 23)中的机械层 - 2 中,我们详细介绍了AD中机械层的相关设置,今天结合PCB封装的设计,给出一些实践建议,并分享一个文件模板。
一些原理图设计最佳实践
要画出清晰、可读性好和整洁的电路原理图,应该遵守以下一般规范:
使用专业的绘图软件:使用专业的电路设计软件,如KiCad、Eagle、Altium Designer、OrCAD等,这些软件提供了丰富的元件库和绘图工具,可以轻松创建清晰的原理图。
组织结构层次:将电路按功能模块进行分组,然后在不同的层次上表示。例如,可以将整个电路划分为模块、子模块和元件层次,使用模块框表示不同的功能模块,并使用引脚连接它们。
使用清晰的线条和标记:确保线条和连接线清晰可见,使用不同的线宽和样式来表示不同类型的信号,如电源线、地线、信号线等。同时,在连接线交叉的地方使用合适的交叉方式,如使用“X”字形或桥接线。
使用符号和标注:使用标准的电路符号和标注,确保每个元件都有清晰的标识,并包括元件的数值和型号。对于重要的信号线和节点,使用清晰的标注和引脚号,以帮助读者理解电路的功能和连接。
逻辑流向和顺序:按照信号流动的逻辑顺序绘制电路原理图,从输入到输出的顺序,这样可以使电路结构更加清晰易懂。
避免交叉线和拥挤区域:尽量避免交叉线和过于拥挤的区域,这样可以减少混乱和误解。如果需要交叉线,可以使用合适的方式进行标记,如添加标号或使用引脚号。
使用合适的布局:根据电路的复杂程度和结构,选择合适的布局方式,如层次布局、网格布局或者混合布局。合理地安排元件的位置和方向,使得电路原理图更加整洁和易读。
注释和说明:在需要解释或说明的地方添加注释和说明文字,以便读者更好地理解电路的功能和设计意图。
反复检查和修正:在完成电路原理图后,仔细检查并进行修正,确保所有连接正确、符号清晰可见、标注准确无误,并消除任何可能导致混淆的元素。
在此基础上,实践中,应该持续优化工作流和规范,改善质量,提高效率。
卡尔曼滤波
在 飞行器姿态计算 中,卡尔曼滤波是最常用的姿态计算方法之一。今天就以目前的理解讲以下卡尔曼滤波。
先用一个日常生活中的例子来解释下卡尔曼滤波。
假设你正在驾驶一辆汽车并使用GPS导航系统。然而,你可能会注意到,GPS定位有时会出现一些误差,导致导航系统显示的位置与实际位置存在差异。卡尔曼滤波就可以用来解决这个问题。
在这个例子中,我们可以将卡尔曼滤波器视为一种数据处理技术,用于融合GPS定位数据和车辆本身的运动模型,从而更准确地估计车辆的位置和速度。
搭建飞书早报机器人
飞书是字节跳动推出的一款企业级通讯及协作平台,于2016年正式上线。它是一款基于云计算技术的软件工具,可以帮助企业实现快速高效的沟通和协作,提升工作效率,降低沟通成本。下面将详细介绍飞书的功能、特点以及使用体验。
功能介绍
即时通讯:支持文字、语音、图片、文件等多种形式的即时通讯,可以随时随地与同事进行交流。
视频会议:支持多人视频会议,可以远程参加会议,方便快捷。
云盘:提供企业级云盘服务,可以在线上存储和共享文件,方便团队协作。
任务管理:可以创建任务并分配给不同的成员,设置截止日期和进度等信息,方便团队协同完成任务。
日程管理:可以创建个人或团队的日程表,设置提醒时间,方便掌握工作安排。
审批流程:可以创建审批流程,设置审批人、审批条件等信息,方便管理工作流程。
数据分析:提供数据分析功能,可以根据数据生成报表和图表,帮助企业进行决策。
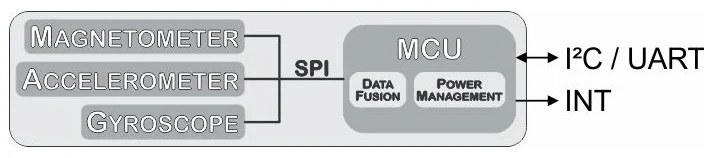
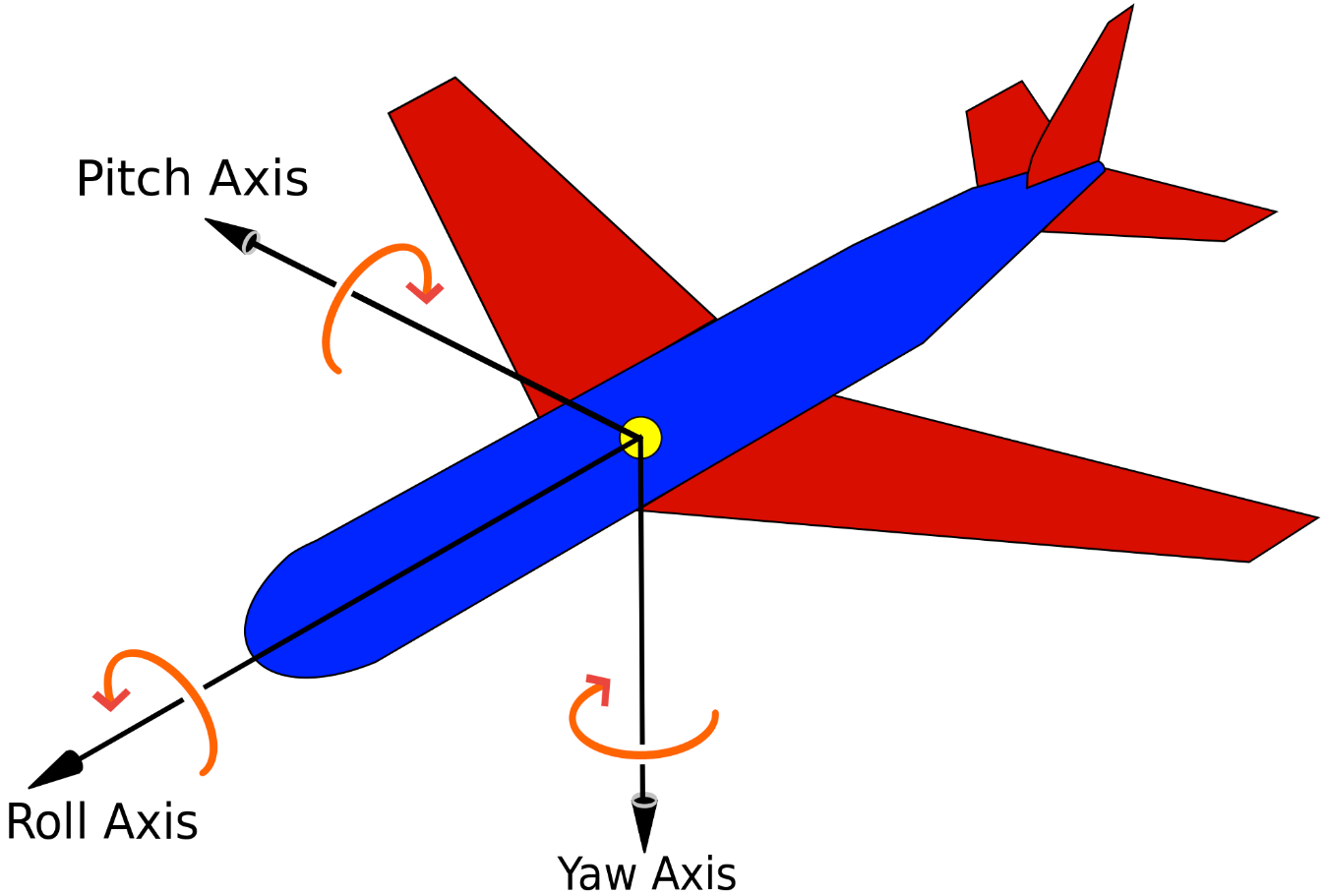
飞行器姿态计算
在飞行器的控制中,姿态计算是至关重要的一步。姿态计算的目标是确定飞行器相对于参考坐标系的姿态,通常以欧拉角(滚转、俯仰和偏航)或四元数的形式表示。
运放和比较器-4
说到运放,是离不开共模、差模、虚短、虚断这些概念的。大家可以想一下运放是怎么设计出来的。
我们想下前面提到的电流源,就是将电压信号转为电流源。然后电流源串一个大电阻,就得到一个电压。这中间的电流源起到中转的作用。运放内部就是利用三极管对电流源进行控制的。运放内部设计思想也是通过这种思路一步一步演变来的。
总结下运放设计思想的三部曲吧:
- 电压转为电流。把输入信号电压差转为电流差,然后进行电流差放大。
- 电流转为电压。放大电压。
- 输出。功率放大,电流电压均放大。